Release 24.09 is now available for your ANYmal! Here, you’ll find additional information about what’s new in this release. Most notably, Operators can look forward to:
- New Rapid Response feature in the Workforce app to control ANYmal remotely
- 4K image capture with the zoom camera for simple visual inspections
- New notifications feature
This release includes essential updates to both the PDB firmware and the zoom camera firmware.
For instructions on updating the PDB firmware, see “Upgrade the PDB firmware” in the Operator’s Manual. To learn how to update the camera board firmware, see “4K image capture” under New Features, below.
You can find the technical notes for this release here.
- Rapid Response (remote operations)
- 4k Image Capture
- New notifications in Workforce app
- Enhanced gas concentration thresholds
- API sends colored inspection images in JPEG format
- Elevation-based colors now relative to ANYmal’s position
- Increased maximum shutdown time
- Entitlement file changes
- Stopping support for Ubuntu 20.04
- Deprecating RCU
- Pausing plugin mechanism support
- Wide Angle Camera Driver
New Feature
Rapid Response (remote operation)
Operators can now control ANYmal remotely using the Workforce app:
To initiate remote operation, press the new interaction marker button in the map display. A simplified version of ANYmal will appear on the screen:
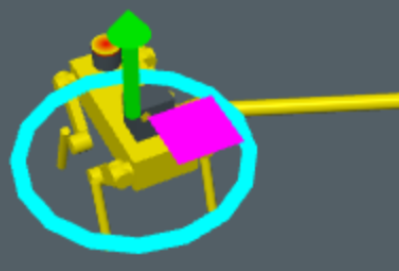
The blue circle adjusts ANYmal’s orientation and the green arrow adjusts the marker’s height on the Z axis. You use the purple square to move the interaction marker and direct ANYmal to a specific location:

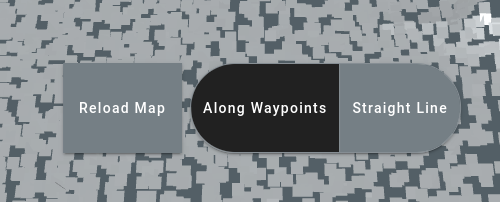
You can place the interaction marker up to three meters from ANYmal’s current location. As you move the marker, a yellow line will appear, showing a preview of ANYmal’s potential path. Before you send the robot to the destination, you can select whether ANYmal travels along waypoints or in a straight line:
When you’re happy with the robot’s path, press play to send it to the destination. The yellow line then turns purple, indicating ANYmal’s committed path.
Note: This feature is enabled by default, and changes how the app records waypoints. The app now automatically creates waypoints for every meter.
As part of this functionality, you can configure ANYmal to return to the docking station when it loses connection to the Operator with control authority and no mission is running, or when a mission ends. This behavior isn’t enabled by default. To enable it, go to the operational mode panel in the Workforce app and enable the Robot should go docking when the connection is lost toggle.
For more information, see “How to use remote operation in the ANYbotics Workforce app” in the Operator’s Manual.
4d Image Capture
The zoom camera now supports capturing images in 4K resolution, providing enhanced detail for simple visual inspections and image capture from the graphical user interface (GUI). To support 4K images, you must update the PDB firmware.
Important: The camera board firmware must meet the following minimum versions:
- Z3-Q603-4K board: Version 5.06e or later.
- Z3CAM-4K board: Version 5.03c or later.
Download the firmware here, where you’ll also find detailed instructions for updating the board. Please note that without these firmware updates, 4K image snapshots won’t work reliably. A warning will appear if the Workforce app or the Operator PC GUI detects outdated firmware.
New Notifications in Workforce App
The Workforce app and the Operator PC GUI now support notifications in certain situations, such as:
- ANYmal being too far from its navigation goal.
- High actuator temperature.
- Low battery.
When a notification appears, you can determine how to proceed. For example, if a high actuator temperature is detected, you can either dismiss the notification or command ANYmal to lie down. If dismissed, the notification reappears after five minutes. Only the Operator with control lease authority can respond to these notifications.
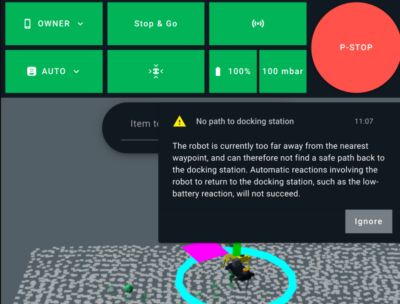
The following screenshot shows an example notification saying that ANYmal is too far away from a waypoint to find its way back to the docking station:
Enhanced gas concentration thresholds
Operators can now define alarm and warning notification thresholds that will be triggered whenever the concentration is above or below the specified values. You can configure the gas detection thresholds in the robot configuration file on the LPC at /home/integration/.ros/config.yaml. For more information, see “How to monitor gas concentrations using the gas sensing payload” in the Operator’s Manual.
Additionally, the SubstanceConcentrationLevel protobuf enum in the ANYmal API was updated to support lower and upper thresholds for gas concentration measurements, providing more precise control over gas concentration monitoring.
Improvements
API sends colored inspection images in JPEG format
The ANYmal API now sends colored inspection images in JPEG format, significantly reducing bandwidth usage. This change impacts any customer who has an integration with ANYmal. For examples of how to decode the images, see “Inspection Example” in the ANYmal SDK documentation.
Elevation-based colors now relative to ANYmal’s position
Enhanced the LIDAR point cloud in the Workforce app’s 3D map so that elevation-based colors are now relative to ANYmal’s position. This makes it easier to distinguish objects around the robot. An object’s color is now based on its relative position to ANYmal so that you can more easily perceive the point’s height. For example, points near the floor are now always orange, regardless of whether the robot is on the first floor or the third. This provides better visual clarity.
Previously, colors were determined by the map, making it difficult to assess an object’s true position in multi-level environments.
The image on the left shows the previous coloring, determined by the map. The image on the right shows the updated coloring:
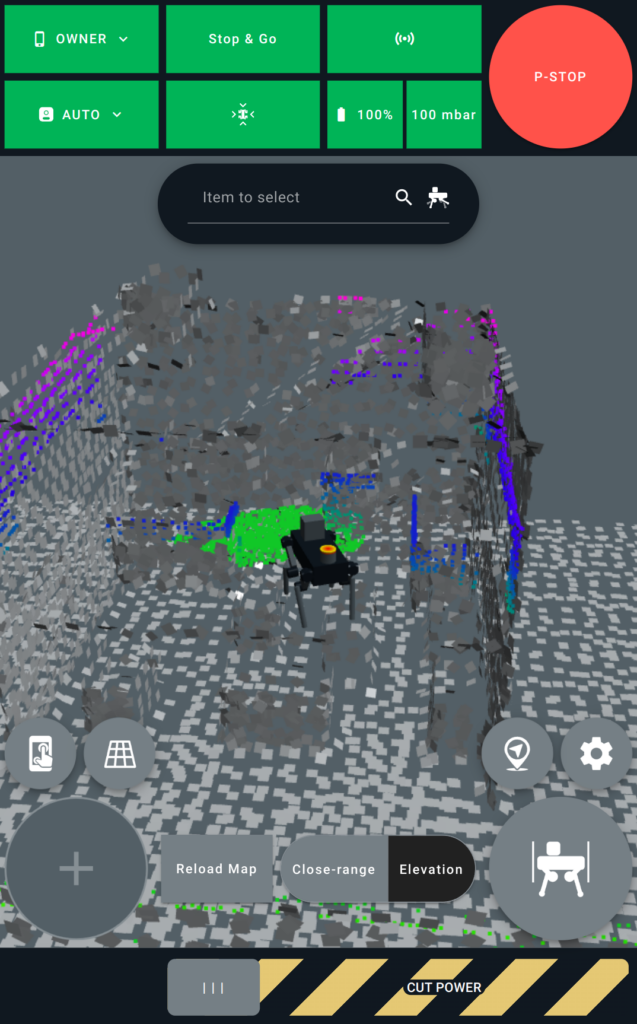
Before
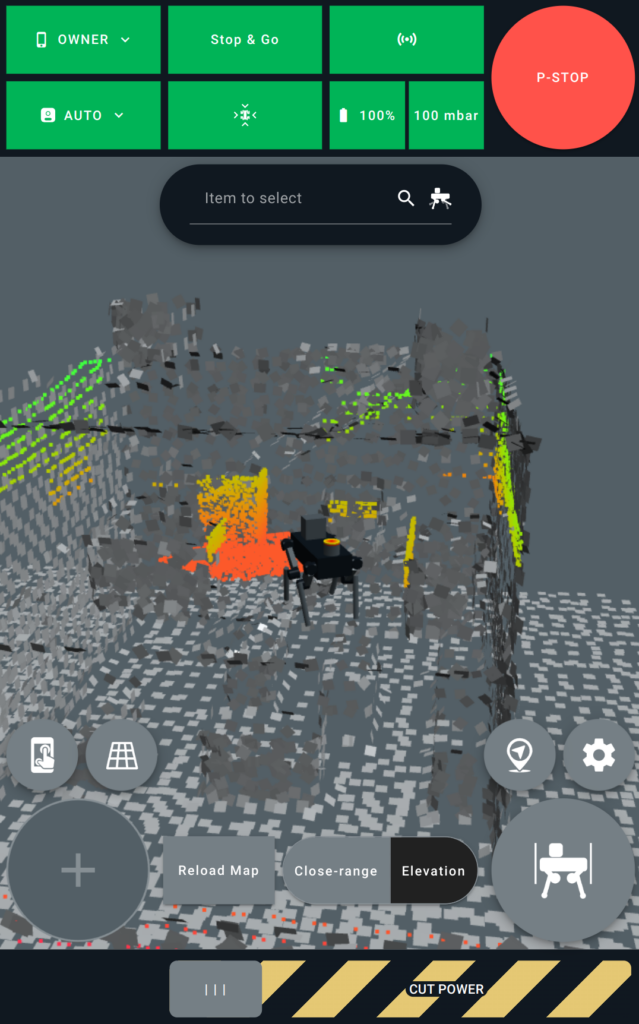
After
Increased maximum shutdown time
ANYmal’s maximum shutdown time has been increased to 95 seconds, which will help mitigate potential computer failures during shutdown. For more information, see “How to shut down the system” in the Operator’s Manual.
Important Changes
Entitlement file changes
You can now load entitlement files via robot-specific configuration, eliminating the need for manual installation. Now, you can obtain your entitlements through a simple software update. When you update ANYmal’s software, you automatically receive the latest entitlement version, which ensures that you get access to the relevant features. This change is fully backward compatible; any previous entitlement files that you installed manually will continue to function until they’re incorporated into the robot-specific configuration.
Stopping support for Ubuntu 20.04
This release marks the final version supporting Ubuntu 20.04. Future releases will target Ubuntu 24.04.
Deprecating RCU
The Remote Control Unit (RCU) feature will be deprecated in Release 25.02. Until then, you can continue using it as usual.
Pausing plugin mechanism support
Due to limited usage, we’re pausing support for plugin mechanisms in the behavior engine, inspection manager, path planning and following, and motion control manager.
Bug Fixes
Wide angle camera driver
Fixed an issue with the wide angle camera driver that caused increased CPU usage during diagnostics. This issue could cause the robot to collapse.