Release 25.03 is now available for your ANYmal! We’ve been hard at work developing new features and enhancements to optimize your ANYmal experience. Here, you’ll find detailed information about what’s new in this release. The technical release notes are here.
New features
Improvements
New Features
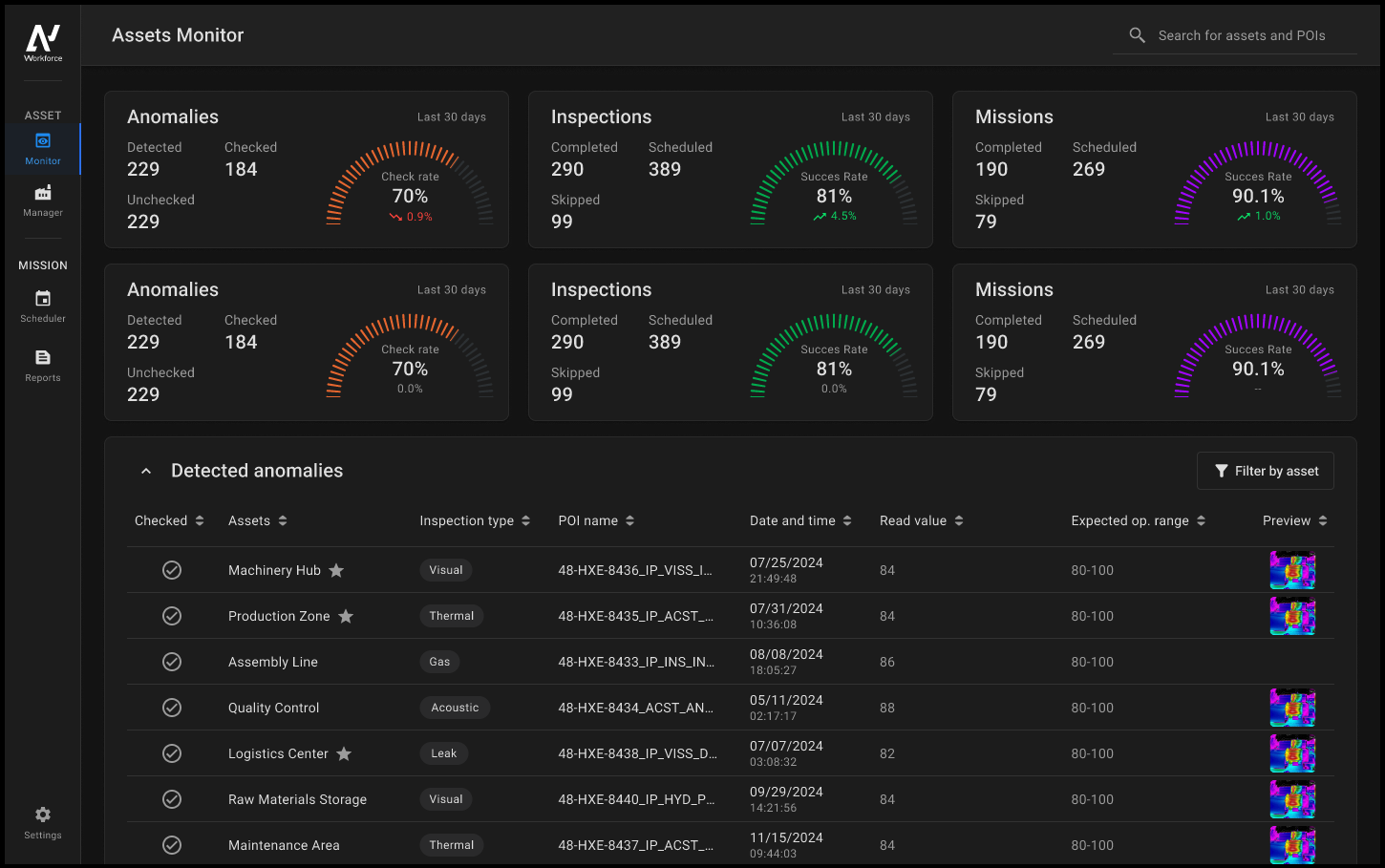
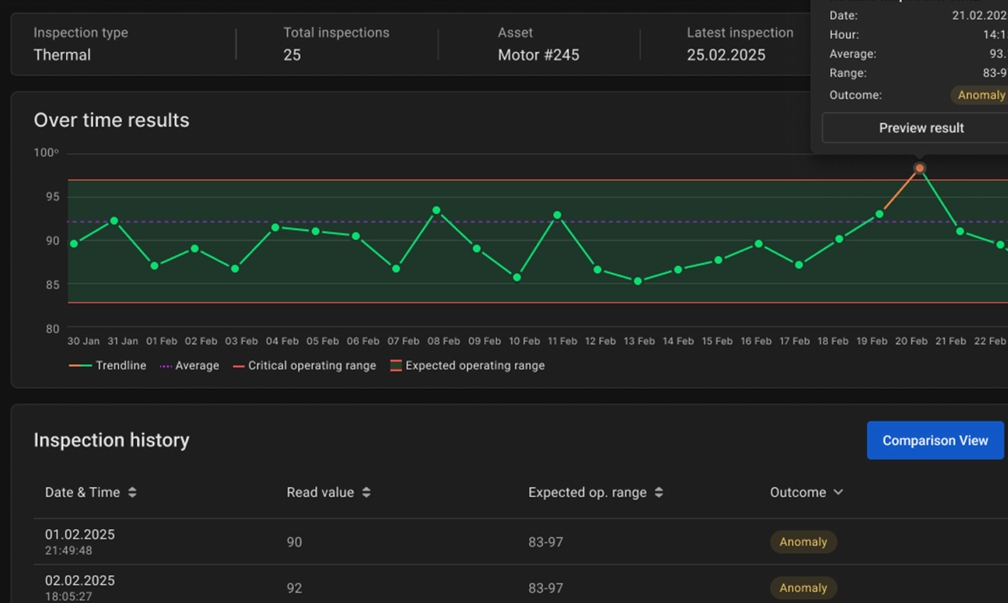
Data Navigator
With this release we’re excited to introduce Data Navigator, a new feature that centralizes ANYmal’s inspection data and provides comprehensive insights into your equipment’s health and performance. Data Navigator structures inspection data around assets, which makes it easier to track performance, detect potential issues early, and optimize maintenance. With its intuitive design and detailed reporting, Data Navigator enhances the efficiency of asset monitoring and gives you data-driven insights to help inform your decision-making.
Key features:
- Centralized data analysis: Data has an organized structure, making it easy to review trends and anomalies.
- Asset monitoring: Helps track the health of industrial equipment by analyzing sensor readings and visual data.
- Customizable settings: Configure units, assign custom robot nicknames, and organize assets to match your operational structure.
- Generate and export reports: Export mission data in different formats, including CSV, PDF, and raw data.
For immediate Data Navigator installation, please contact our customer success team at support@anybotics.com. For the initial rollout phase, ANYbotics is prioritizing industrial customers. We appreciate your understanding.
Support for multiple docking stations
We’ve added support for multiple docking stations in your environments, which significantly increases mission flexibility and site coverage. This enhancement allows ANYmal to create and execute missions that involve multiple docking stations, or travel from one docking station to another. This extends ANYmal’s operational range–the robot is no longer limited to a single docking point and can optimize its workflow across larger areas.
To further enhance the docking process, we’ve introduced smart docking station suggestions, enabling ANYmal to evaluate and select the best docking station in real time. The suggested docking station is selected based on factors such as the robot’s current position, docking station distances, and path accessibility.
In the ANYbotics Field Operator app, the suggested station appears next to the search bar. Tap the docking station icon to focus the map on the suggested station.

In the GUI, the suggested station appears in the Operational Modes panel:
Additionally, docking is now a standard mission task that you can trigger from the GUI or the app.
This feature is currently available for testing in the simulation. Docking stations will be available to ship in May. If you have multiple docking stations and need support, contact us at support@anybotics.com or fill out the support contact form.
Additional docking updates
This release also contains additional docking updates:
- API changes: The
system_behavior_plugins::Docktask is no longer supported. Please usedocking_behavior_plugins::Dockinstead and update your missions accordingly. - Docking alignment offset namespace change: The configuration namespace for docking alignment offset has been changed from
/docking_behavior_plugins/dockto/operational_mode_manager/dock. Please update your.ros/config.yamlfile as needed.
Create waypoints using the app
We added the ability to create waypoints using the ANYbotics Field Operator app. With the robot in Manual mode, tap the waypoints button and then guide the robot to the place on the map where you want to add a waypoint. Then, tap Add Waypoint or Add oriented Waypoint.
If you add an oriented waypoint, the robot aligns with the waypoint’s exact orientation.

SLAM Maps file format
The default file format for SLAM maps has changed from .pb to .zip. This update streamlines map storage and management. If you’re working with a newly created environment, no action is required.
If you’re migrating from an older environment (i.e., 24.11 or earlier) and want to extend an existing map, you need to open /configs/default.yaml and replace all occurrences of map.pb with map.zip. It’s important to make this change only after saving your map to ensure that the system correctly references the new file format. If you don’t want to extend your existing map, no action is required.
GUI log retrieval
Added a new feature to the GUI that enables easier log retrieval. To support this functionality, the logs button was added to the GUI’s bottom panel:
![]()
Select this button to open the Logs panel, which contains parameters that control the log details (e.g., included information, start and end dates). This new feature replaces the previous functionality, which required you to download logs in the Logs tab of the Data Sync panel.
Median thermal inspection measurements
Added the ability to calculate the median temperature of a full image or region of interest for thermal inspections. To support this functionality, Median was added to the Measured temperature drop-down for thermal inspection points.
Taking the median temperature helps mitigate the impact of diverse temperature values, making it useful in environments with significant background temperature variations. This improvement enhances temperature trend analysis, offering greater accuracy in thermal inspections.
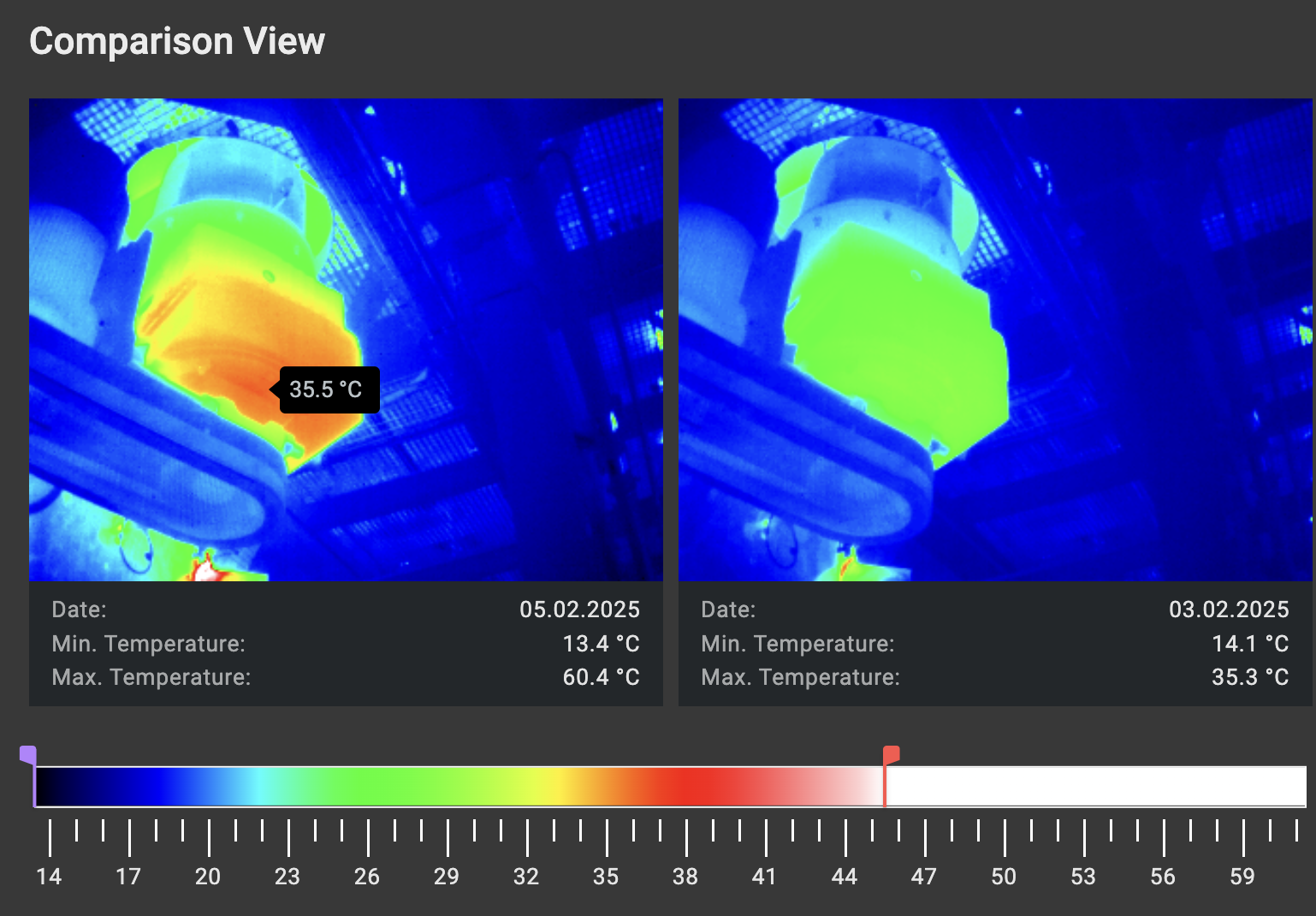
Colorized temperature range slider
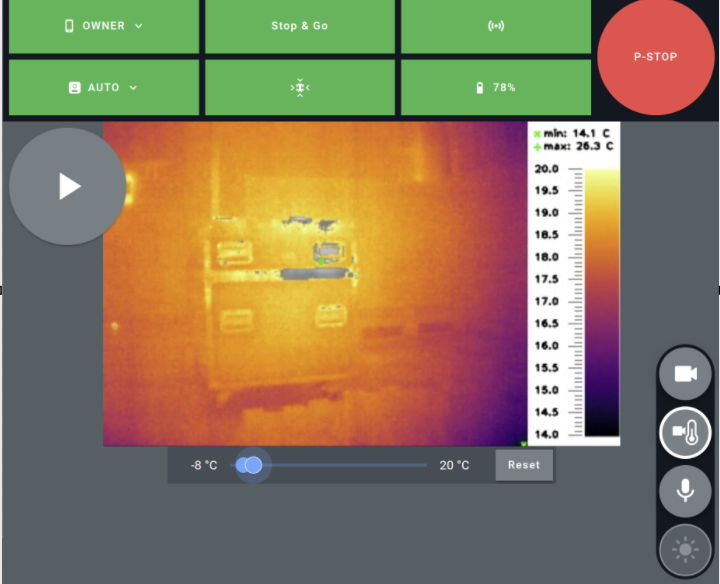
Added a temperature slider in the ANYbotics Field Operator app that enables you to fine-tune temperature ranges for the visualization of thermal images.
This new feature allows you to adjust the colorized temperature range while teleoperating ANYmal to focus on specific areas of interest in environments with substantial temperature variations. By narrowing down the displayed temperature range, you can better identify patterns and anomalies and perform deeper analysis.
Configure the payload’s rest position
Added a new parameter, inspection_manager_ros/reset_to_rest, that configures the payload to return to a rest position when ANYmal moves or docks. This feature helps minimize dirt accumulation on the payload cameras, making the robot easier to maintain.
To enable this functionality, set the parameter to true. After enabling it, you can adjust the rest_position parameters for tilt and pan to set the desired rest position. By default, the tilt is set to 0.15 and the pan is 1.57, which positions the payload to face left and downward when at rest. To adjust the tilt further downward, increase the tilt value.
Support for imperial units
The GUI now supports imperial units, allowing you to view distances in feet and temperatures in Fahrenheit in mission monitoring and thermal images. This feature is controlled with the --localization toggle.
Improvements
Persistent map settings
The ANYbotics Field Operator app now persists your map display settings when switching between windows. When you open a panel in the map view or activate a setting, it stays open and visible, even if you navigate away from the map.
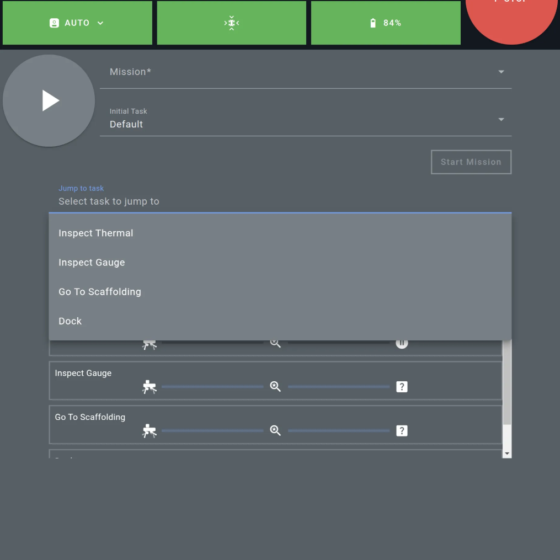
Task search enhancement
Added the ability to jump directly to a task after a mission has started. To support this functionality, the Jump to task drop-down list was added to the mission player.
Changes
New waypoint alignment
ANYmal now aligns with waypoint edges if the starting node is configured with a default/ignore orientation tolerance (i.e., the Use Default? checkbox is selected in the Waypoints Editor). Validate your missions after updating, and pay special attention to edges that are configured in blind mode or in narrow corridors.
Before
After
SLAM Maps Editor
The new SLAM Maps Editor combines the functionality of the SLAM Maps Transformer and SLAM Maps Merger tools, providing a single solution for opening, inspecting, merging, and transforming maps.
Data synchronization changes
The Data Synchronization panel in the GUI now uses predefined paths to sync environment data packages, mission reports, and robot logs. This update streamlines data transmission workflows and enables container-based software execution.
New thermal inspection entitlements
New thermal inspection entitlements have been added. Please update the entitlements on your robot to continue using thermal inspection features.
Protobuf API changes
- Deprecated the
Uidmessage structure in favor ofstringattributes. See the protobuf files for the full scope of changes. - In the
NavigationGoalmessage, renamed thead_hocfield todetailedand thepredefinedfield touid. - In the
TaskDescriptionmessage, renamed thead_hocfield todescriptionand thepredefinedfield touid.
Other noteworthy changes
- The maximum duration for auditory inspections has been changed to three minutes. This change was made to ensure that API messages remain a manageable size and also prevents unnecessarily long missions.
- Refactored the
anymal_dURDF to significantly simplify setup and make deployment faster and easier. - When creating or updating environment items, you now set a label and a name. Editing a label automatically updates the name.
- You can now set a default environment for the simulation.
Fixes
Finally, we fixed the following issues:
- Fixed an issue where inspections from the same position weren’t taken when the robot was in Freeze mode.
- Resolved an issue where the API missed inspection events when localization was enabled. Now, the correct frame ID is sent.
- Fixed a problem where video recordings were cut short when the robot had high CPU usage.