We are happy to announce that Release 24.04 is now available for your ANYmal. Here, you will find additional information about what’s new in both 24.02 and 24.04. Most notably, Operators can look forward to:
- New features and upgrades to our API/SDK
- Support for the rollout of our integrated LTE Module
- Improvements to Workforce Field Operator
Note that this release additionally comes with a PDB firmware update. For instructions on how to perform this update, see the Operator’s Manual. (Not required if you’re updating from 24.02 to 24.04)
Note that this release comes with a required update to ads_local and your .ros/config.yaml file. More information below. Additional information for Operators with a Gas Sensor is also required.
Note that this release comes with significant reliability updates for ANYmal Data Server. For instructions on how to perform this update for on-premise servers, see the Operator’s Manual.
If you’d like to read the technical notes on both 24.02 and 24.04, you can find them here and here. Updated SDK documentation can be found here.
Workflows Changes
New Features – ANYmal Software
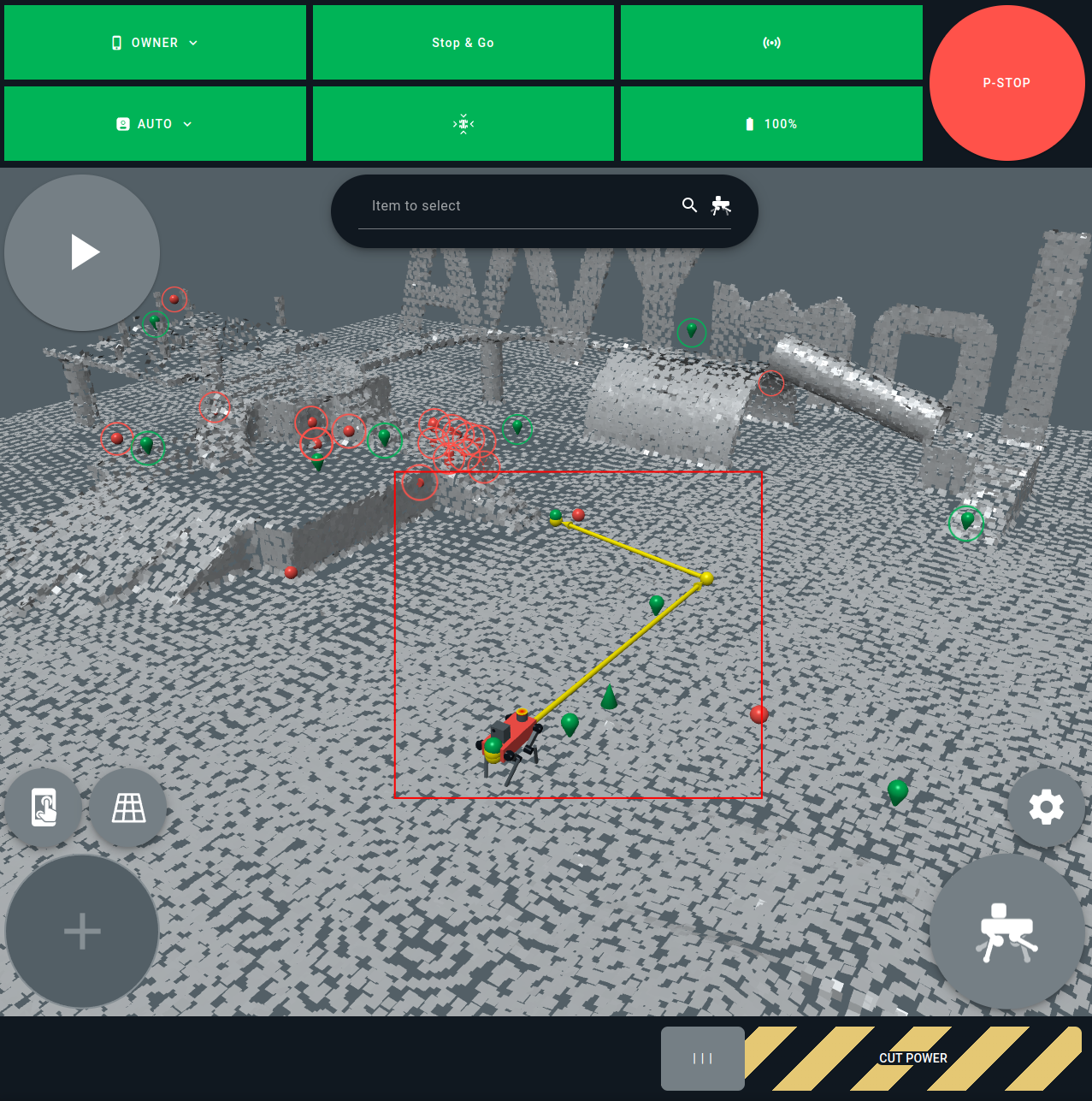
Workforce Field Operator Path Preview
Workforce Field Operator now shows ANYmal’s predicted path when sending it on a mission, similar to the path preview feature in the Operator GUI. Operators now have better visibility into ANYmal’s planned autonomy with less reliance on the Operator GUI, furthering our push towards supporting a Linux-less experience with ANYmal.
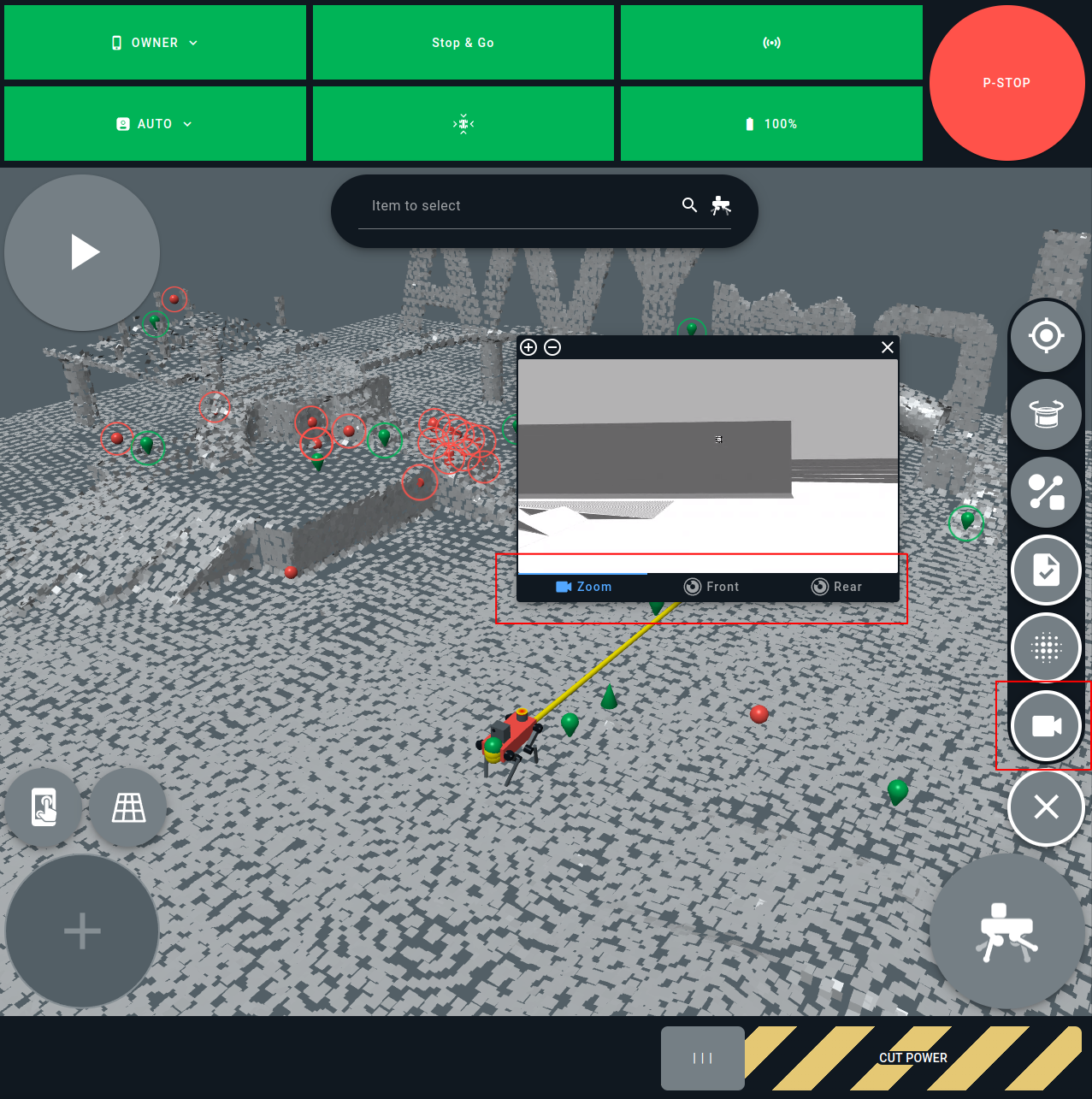
Camera Views Now Available on the 3D Map Page
Operators using Workforce Field Operator now have additional options for live views from ANYmal’s cameras. In addition to the zoom camera feed, both wide angle cameras are now available. When following ANYmal with Workforce Field Operator, or using it remotely, Operators can get a 360° view of ANYmal’s surroundings.
Additionally, the backend implementation of these video streams have been updated to use WebRTC (same as our API), improving quality and latency to enhance the Workforce Field Operator experience.
New Views for the 3D Map
We improved Workforce Field Operator’s visualization options so that Operators can have better situational awareness while operating ANYmal.
Operators can now change the viewing angle of the map, alternating between perspective and top-down orthographic views of the map. Using these options, Operators can choose which option they like best in a given situation.
Operators can now choose how to visualize the live point cloud view coloring, using distance (black and white) or elevation (rainbow) to vary the visualization. Operators using ANYmal’s Remote Operations feature might find this particularly useful for visualizing the space that ANYmal is in.
Edit Waypoint Graph in Field Operator
In our continuing effort to shift away from the Linux-based OPC GUI, waypoint editing is now available in Workforce Field Operator. To enable the waypoints visualization, open the settings menu and click the waypoints icon. Then, select an edge or node to open the options menu to delete or edit the edge or node. Operators cannot yet add waypoints using Field Operator. This will be updated in a future release.
Note that the Field Operator app needs to own the Control Lease and be in manual operational mode.
Mode Editing Options for Points of Interest
The Workforce Field Operator can now drag and drop existing points of interest in the 3D Map, enabling Operators to quickly adjust environment objects on the fly. Simply click an object to edit and rotate or drag the icon on the 3D Map view. Click save when completed.
New Features – ANYmal API
Live Streaming via LiveKit
Live streaming from ANYmal is now available over API! Using the LiveKit interface, integrators can now receive a live video feed from ANYmal’s front and rear wide angle cameras, zoom camera, and thermal camera, enabling significantly better situational awareness for remote operation of network-connected robots. For more information on how to implement the stream, see LiveKit’s open source API.
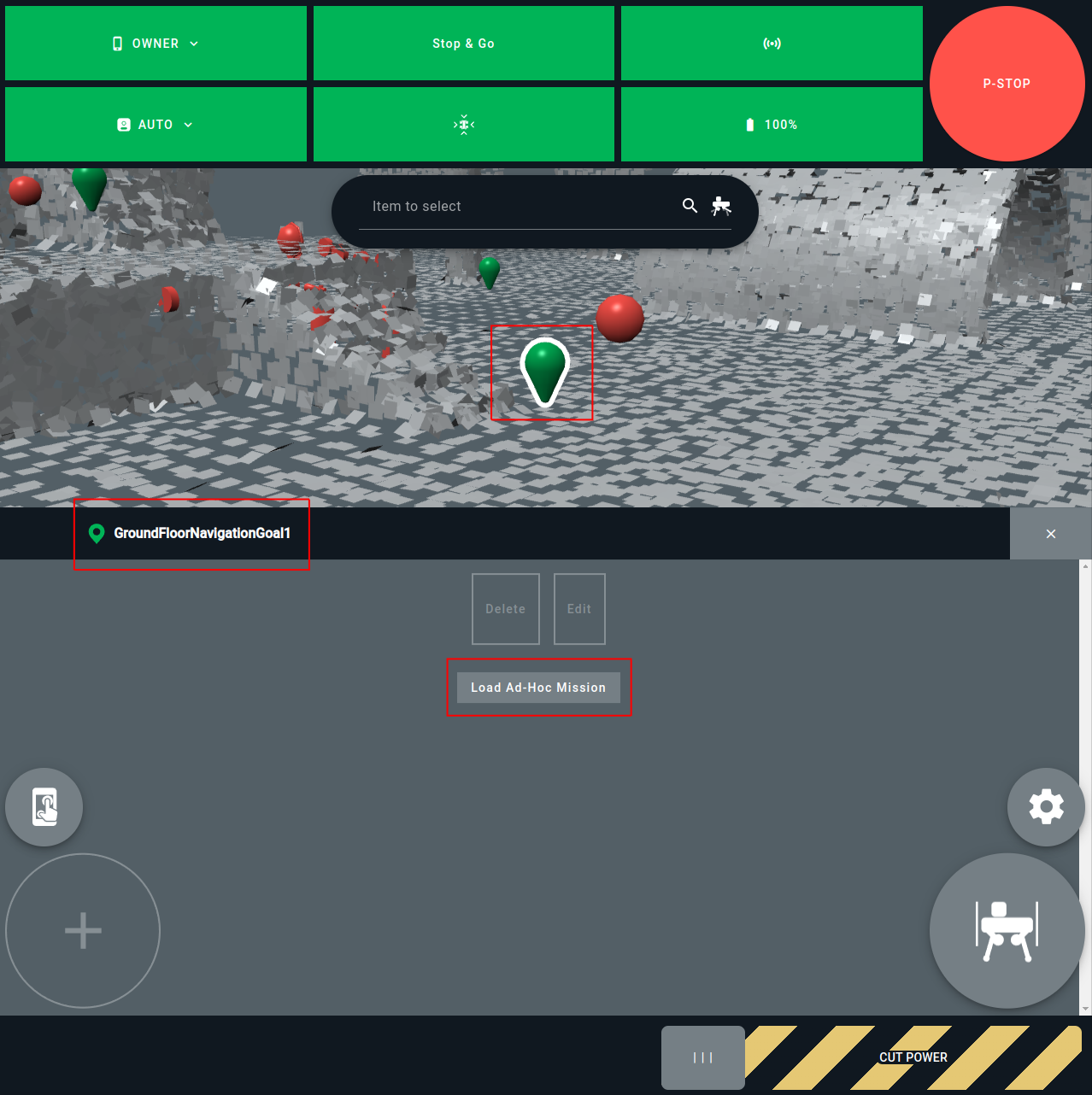
Ad-Hoc Missions
Integrators can now create their own missions using any point of interest object currently available in ANYmal’s environment configuration. Integrators now have the tools to define missions as they see fit, such as creating changing daily missions based on feedback for today’s needs. We look forward to hearing about all of the creative ways that integrators are able to customize missions to their needs. For details, please see the API documentation and the mission_example in our SDK examples.
Change User Interaction Mode
Applications can additionally command ANYmal to change user interaction mode (between Auto and Manual). This is especially important because manual control of the inspection payload through API requires that ANYmal be in Manual mode, with the API user in control.
Gas Concentration Measurements Available
We are happy to introduce a new type of inspection event, Gas Concentration, to our API. Operators with our prototype gas sensors can now start taking advantage of this feature. If you’re interested in hearing more about our gas sensor integrations, please reach out to your Sales Manager.
ANYmal Feedback and Status Improvements
ANYmal API now provides more accurate descriptions about why ANYmal couldn’t complete an action in response to being in the wrong user interaction mode, enabling better error handling and automation for ANYmal integrations. Similarly, ANYmal API now provides more accurate information about ANYmal’s online status. Lastly, we fixed issues where the ANYmal API incorrectly reported interpretation results from inspection intelligence points of interest. These changes allow integrators to use more streamlined workflows.
Helper Functions Deprecated in ANYmal SDK
We are deprecating several helper functions within the SDK to make it easier for integrators to use and for ANYbotics to maintain. We recommend that you remove any deprecated functions from your implementation as soon as possible. Note that this release will continue to support the deprecated functions.
Important Changes
ADS Port Changes
To deconflict port usage for ANYmal communications, we changed default ports for ADS. To ensure compatibility, add or modify the following to your .ros/config.yaml file. Manual instructions can be found here.
If you have any questions, contact us at Support.
Additionally, please run ads_local update after performing the update on OPC.
anymal_router Now Supports LTE Modules
As we prepare for mass rollout availability of our native LTE module for ANYmal, anymal_router is now capable of handling configuration of the LTE module. If you are interested in purchasing an LTE module for your ANYmal, please reach out to us through Support.
Workflow Changes
Stair Climbing Nodes in the Waypoint Graph should use non-default tolerances
We discovered an edge case where ANYmal could fail to reach a node at the top or bottom of stairs, which would cause ANYmal to take small steps around the node when using default tolerances. To avoid this, we highly recommend that you uncheck “Use Default?” for both ends of a stair climbing edge. This is the recommended standard practice when configuring waypoint graphs.
Preemption No Longer Editable in Mission Editor
In the Mission Editor, the state transition of preemption has always been editable, but should always lead to the Preemption state, otherwise known as pause. This ensures that a mission is always pausable, and changing this transition led to unwanted behavior. In light of customer feedback, we removed this option and “preemption will always lead to preemption,” enabling simpler mission setup and more predictable behavior during mission pauses.
Note that current missions will also have its Preemption transition ignored, making all missions pausable as configured.
Improved Low Light Image Quality of the Zoom Camera
In response to customer feedback, we changed how the inspection payload’s zoom camera responds to low-light situations. Previously, the zoom camera changed to black and white mode in particularly low-light situations to try and get a higher-quality image. In practice, this hasn’t made a significant quality improvement. Now, the zoom camera will stay in color mode.
Anomalous Gas Sensor Measurements Now Available in the Inspection Report
Operators with a gas sensor integrated with ANYmal will now see anomalous measurements in the Inspection report, including concentration and measurement location. Now, the gas sensor provides additional value by enabling easy access to historical anomaly data throughout its routine missions.

Auditive Frequency Inspection Anomaly Definition
You can now use auditive frequency inspections to determine if a detected frequency is an anomaly. Previously, ANYmal could define an anomaly only if it detected a specific frequency. Now, the opposite can be defined, if the frequency is detected, consider that nominal, and the lack of a specific frequency is marked anomalous.
Bug Fixes
ADS File Synchronization Fixes
Fixed an issue where the ANYmal Data Synchronization (ADS) didn’t sync all of the files that Operators requested. Now, ADS syncs all selected files and doesn’t report 100% completion when there are missing files. To benefit from these changes, please update all instances of ADS.
To update ads_local, run ads_local update, follow the instructions in the manual here.
To update on-premise ADS servers, follow these instructions in the manual.
To update ANYbotics hosted ADS servers, please contact us through the Support form.
Battery State of Charge Reported Incorrectly After Power Cut
Fixed a bug that caused the battery to report an erroneous state of charge after you engaged the cut power slider.