Release 24.11 is now available for your ANYmal! Here, you’ll find additional information about what’s new in this release. You can find the technical release notes here.
New features
- ANYmal Software Installer
- Notification center
- Zoom camera quality enhancements
- Add edges in the Field Operator app
- HTTPS and certificate requirements for the Field Operator app
- Waypoints graph changes save automatically
- Network isolation in NAT mode
- Improved SLAM memory management
- New SLAM file format
- Video results for static video inspections
- On-premise ADS security
- Docking debugging toggle
New Features
ANYmal Software Installer
Added the new ANYmal Software Installer (ASI), which makes it easier to install and upgrade the graphical user interface (GUI) and simulation on the operator computer.
If you’ve installed a recent version of the GUI or simulation, the ASI is already installed. To confirm the installation, open a terminal and run anymal_software_installer --help. If you need to install the ASI, the process is quick and easy. For full installation instructions and troubleshooting, see Install the operator graphical user interface (GUI) or simulation manually in the Operator’s Manual.
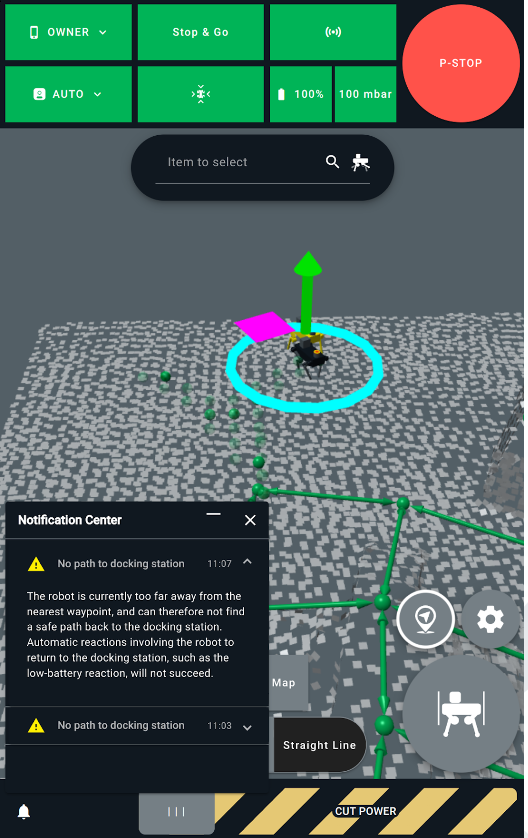
Notification center
The Field Operator app now features a notification center that shows all of your received notifications in one convenient location. To open the notification center, select the notification icon in the app’s bottom-left corner. The center contains both informational notifications and actionable notifications that require your input (e.g., how to respond to a critically low battery).
If you ignore an actionable notification, the app sends it to the notification center, where you can respond to it at a time of your choosing.
The notification center keeps a record of all notifications and interactions so that you can easily reference your past actions.
For more information, see The notification center in the Operator’s Manual.
Zoom camera quality enhancements
Made a number of zoom camera enhancements to improve your experience during inspection tasks:
- Inspection intelligence now uses 4K images.
- Adjusted LED luminosity to improve image detail and sharpness in inspection intelligence tasks and simple inspections. Additionally, the camera now waits for focus and exposure to stabilize before capturing images.
- The camera now zooms in to detected objects during inspection intelligence tasks, improving objects’ sharpness and detail.
- Improved exposure calculations to ensure that the appropriate aperture is selected for each inspection, enhancing image clarity and inspection accuracy.
- Initial object detection now uses a wider field of view during inspection intelligence tasks, increasing detection rates.
As part of these enhancements, visual simple inspections, video recording, and inspection intelligence items now offer flexible zoom camera configurations to adapt to a variety of scenes and lighting conditions:
- Full auto mode: Suitable for large objects or broad scenes where you want the entire area to be in focus.
- Spot mode: Ideal for objects centered in the frame, providing focused clarity for the target. Images might be out of focus if the inspection object is not centered due to setup error or a direction that can’t be reached.
- Distance-based mode: Distance estimates determine the focus and exposure, which is useful when the other modes are inadequate. This is the default mode. To use auto-exposure only, set
camera_f_stopto-1. For a fixed aperture, setcamera_f_stopto the desired value.
Add edges in the Field Operator app
You can now add edges between waypoints in the Field Operator app. To add a new edge, select a waypoint, select Edges, and then select the waypoint that you want to connect with the edge. The new edge appears in yellow, indicating a pending edge. Select Create to add the edge to the map.
For more information, see Manage edges using the ANYbotics Workforce app in the Operator’s Manual.
HTTPS and certificate requirements for the Field Operator app
Workforce is now served via HTTPS, which fixes an issue that prevented the app from opening in full-screen mode when you accessed it through a shortcut. This update involves installing a CA certificate to ensure secure communication.
When you open the app after upgrading to this release, a landing page will appear with instructions for installing the certificate. The steps below are the same as the instructions on the landing page. To complete the installation on your Samsung tablet, open the Field Operator app and then complete the following steps:
- Select the link to download the CA certificate.
- Close the browser. You have to install the certificate in the tablet settings.
- Go to Settings > Security and Privacy > Other Security Settings.
- Select Install from Device Storage > CA Certificate.
- Select the downloaded ca.crt file and then select Install.
- To complete the setup, open the Field Operator app and select Workforce.
You can also add a shortcut to the Home screen so that the Field Operator app opens in full-screen mode:
- On your tablet, open the browser and go to the Field Operator app.
- Tap the menu icon and, from the menu options, select Add to Home Screen.
- In the prompt that appears, select Install to add the Field Operator as an app on the tablet.
- Go to the app list, press and hold the Field Operator app icon, and then select Add to Home.
- Select the Field Operator shortcut on the Home screen and confirm that the app opens in full-screen mode.
If you need help installing the certificate, contact ANYbotics support.
Waypoints graph changes save automatically
In the Field Operator app, changes to the waypoints graph are now automatically saved to the file system, allowing you to focus on your workflow instead of spending time manually saving changes. This update also ensures that you don’t lose your changes after restarting the Robot or simulation.
Network isolation in NAT mode
When connecting to the on-robot access point in NAT mode, wireless clients now are in an isolated network zone and access to the infrastructure network is denied by default, increasing control over network access and enhancing overall security.
This update separates the Robot’s two wireless radios. When connected to the Robot’s Wi-Fi, you won’t have internet access. However, the Robot will still be connected through the other radio. This change doesn’t affect LTE connectivity.
To enable access to the infrastructure and internet, you must reflash the router using anymal-router flash. Ensure that you have access to the Robot and an M12 Ethernet cable. Then, set up the router again using anymal-router setup. If the router firmware is already up to date, you will have to provide --force-flash as an option.
Important: Ensure that the operator computer (OPC) is running version 24.11 of the anymal-router.
Improved SLAM memory management
ANYmal can now handle larger maps in SLAM while using less memory. The system optimizes memory by only storing map information that’s relevant for localization at ANYmal’s current location, preventing memory usage from growing with map size. This feature is controlled by the new slam_memory_management feature toggle, which is enabled by default. To disable it, set the toggle to basic.
New SLAM file format
Introduced a new .zip format for SLAM, which removes the 2 GB limit of the previous protobuf-based format. The system supports both the original .pb format and the new .zip format; we recommend using .zip for large environments. Note that .zip format isn’t enabled by default and isn’t integrated yet with the SLAM merger and SLAM transformer applications. To use it, you must manually enter the file extension when you save or load maps.
Video results for static video inspections
The ANYmal API can now send video results from static video inspections. Recordings up to 30 seconds long are supported, and the videos are provided in MP4 format. These videos give you a more comprehensive view of inspection outcomes, helping you make informed decisions about your operations.
On-premise ADS security
Added the ability to revoke access to the ANYmal API for individual TLS certificates so that you can manage employee offboarding and compromised certificates more easily. Now, you can configure on-premise ANYmal Data Servers (ADS) to consider certificate revocation lists when verifying an ADS client’s authenticity. For more details, contact ANYbotics support.
Docking debugging toggle
Introduced a new feature toggle, docking_debugging_system, that enables the docking debugging system on ANYmal. This system provides additional information about docking maneuvers (for example, the Robot’s position with respect to external fiducials). You can use this information to troubleshoot docking issues and help ANYmal dock more efficiently. For more details, contact ANYbotics support.
Improvements
Expanded API inspection data
API inspection events are now self-contained, removing the need to cross-reference multiple Protocol Buffer messages. Now, all interpretations (e.g., normal/anomaly) and nominal operation ranges/thresholds are included in a single event. This update improves clarity and reduces complexity, allowing you to quickly assess event outcomes and work more efficiently.
Updated API documentation
Added a new PDF version of the ANYmal API & SDK documentation to improve user experience. The updated documentation now contains conceptual information on gRPC, Protocol Buffers, the API structure, and more, helping streamline integration. You can access the updated documentation here.
Gas sensor data ignored during initial warm-up period
During ANYmal’s manufacturer-specified warm-up time, gas sensor data is now marked as invalid and isn’t visualized. This update means that you no longer receive unnecessary notifications about inaccurate warm-up readings and can instead focus on real, actionable alerts.
Disabled continuous mode in auditive frequency inspections
This mode has been removed because it isn’t supported by the behavior engine. When you configure points of interest for this type of inspection, the configuration status of the continuous mode setting is ignored.
Enhanced app communication stability
Improved communication stability between the Field Operator app and ANYmal, especially in cases where another app instance disconnects unexpectedly.
Other noteworthy changes
Aside from our exciting new features, here are some other noteworthy changes that are included in this release:
- Removed deprecated SDK classes and methods.
- Removed the deprecated visual inspection dial. To avoid errors, delete any existing
visual_inspection_dialinspection points or change them toinspection_intelligence.
Fixes
Finally, we fixed the following issues:
- An issue where the Robot incorrectly used stair climbing mode if a waypoint near stairs was set with a default orientation tolerance. This could cause ANYmal to sway back and forth at the waypoint.
- An issue where the Robot couldn’t handle simultaneous path planning requests.
- An issue where the Robot became unresponsive to navigation or path planning commands.
- An issue with video streaming reliability where the video camera stream would sometimes freeze unexpectedly.
- An issue that could cause docking issues. If your ANYmal fails to dock, you might have to remove the following parameters from the
~/.ros/config.yamlfile on the locomotion computer (LPC):
docking_behavior_plugins:
dock:
docking_station_alignment_pose:
position:
...
For more details, contact ANYbotics support.